StableDiffusion 详解
StableDiffusion 是一种基于扩散模型的生成模型,能够生成高质量的图像。记得第一次使用的时候还是高一,用 qq 登录一个啥网站,然后生成第一张图片的时候的惊奇感,那个时候生成一次图片还需要排队,还需要等好久。=v=往事
我们带着一些问题去了解 StableDiffusion 模型的原理和实现:
- What is StableDiffusion? 什么是 StableDiffusion 模型?
- How to visually understand the diffusion model? 如何可视化理解扩散模型?
- How to derive the diffusion model mathematically? 如何推导扩散模型的数学原理?
- How to train a StableDiffusion model and infer it? 如何训练 StableDiffusion 模型并进行推理?
1. 什么是 StableDiffusion 模型?
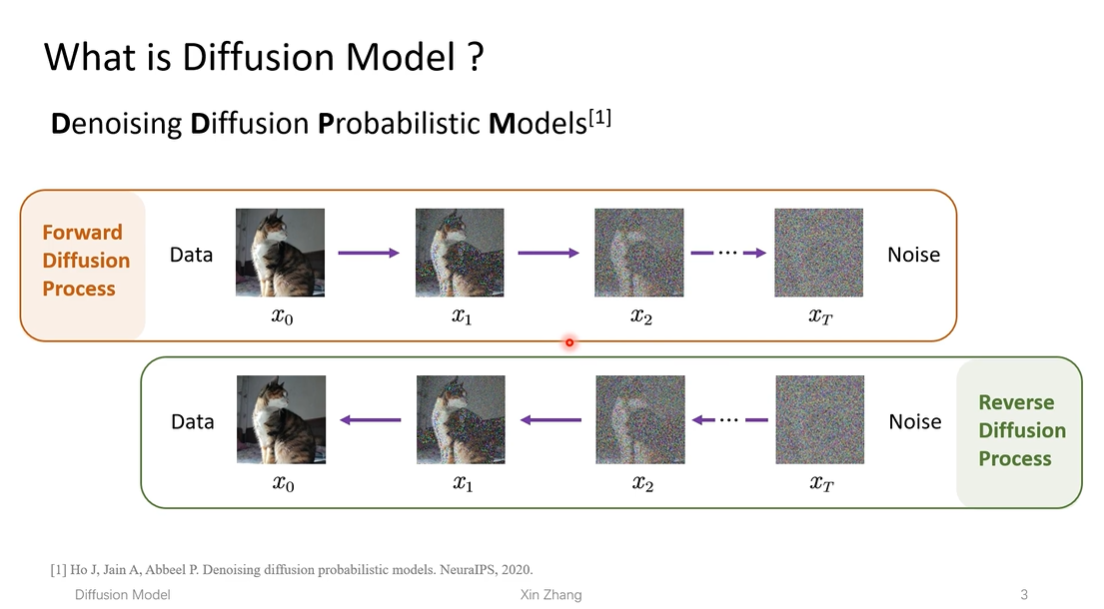
Denoising Diffusion Probability Model 加噪扩散概率模型,顾名思义一下,加噪,就是如图,$x_{t-1}$ 在加入一个均值为 0、方差为 1 的高斯噪声,得到 $x_t$,一步一步地加噪,直到得到纯噪声图像。
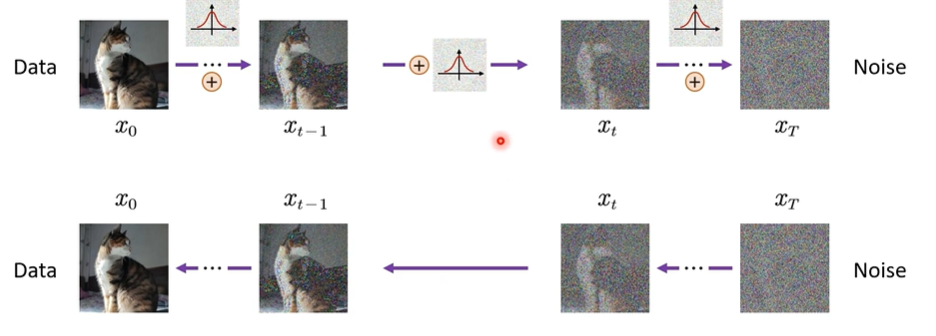
而去噪,就是如图,从 $x_t$ 开始,我们训练一个模型(神经网络)来预测 $x_t$ 的噪声,然后在 $x_t$ 的基础上减去预测的噪声,得到 $x_{t-1}$,以此类推,直到得到原始图像。
而我们不可能在每一步都训练一个模型的,因为这样会非常耗时,而且需要大量的计算资源。为此,我们会为模型注入一个 $t$ 的变量(timestep),来让模型知道当前是在第几步,这样我们就可以训练一个模型来同时处理所有的步骤了。
大佬的话
从数学角度深入:
1. 加噪过程
我们定义一个前向扩散过程,从原始图像 $x_0$ 开始,逐步加入噪声,直到得到纯噪声 $x_T$。这个过程可以表示为:
\[x_t = \epsilon(x_t, t) + \sigma \epsilon_t\]其中,$\epsilon$ 是一个噪声函数,$t$ 是时间步,$\sigma$ 是噪声标准差。
如何理解这个公式:
\[x_t = \epsilon(x_t, t) + \sigma \epsilon_t\]首先对于任意一个正态分布
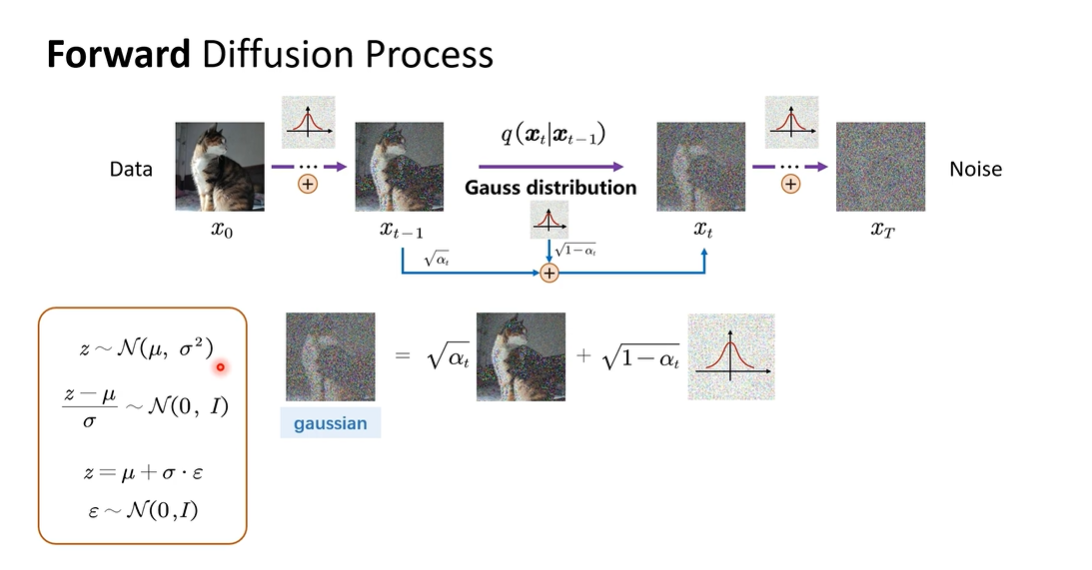
\[z \sim \mathcal{N}(\mu, \sigma^2)\]我们通过一些简短的数学变换可以得到一个标准的正态分布
\[\frac{z-\mu}{\sigma} \sim \mathcal{N}(0, I)\]那对于图像的任意一个随机采样的像素,我们可以将其表示为:
\[z = \mu + \sigma \cdot \varepsilon, \quad \varepsilon \sim \mathcal{N}(0, I)\]其中,$\epsilon_t$ 是一个标准正态分布的随机变量,$\sigma$ 是噪声的标准差,$\mu$ 是图像像素的均值。通过这个变换,我们可以将任意一个图像像素表示为一个标准正态分布的随机变量,这个过程我们叫做 重参数化技巧(这里联系 VAE 的重参数化技巧,也用到了同样的技巧)。
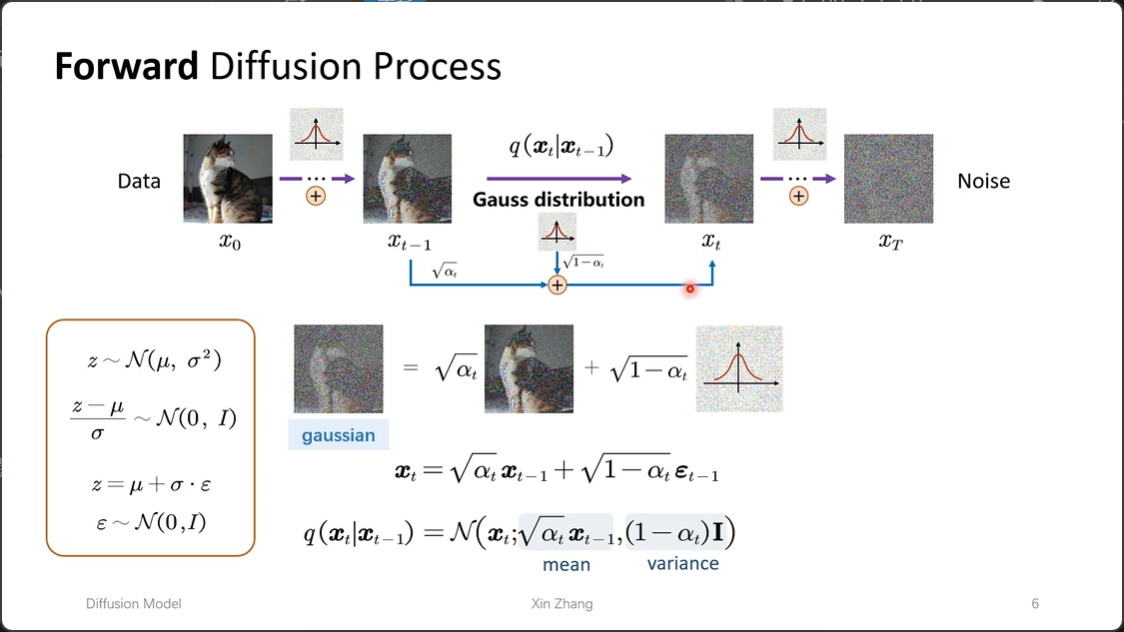
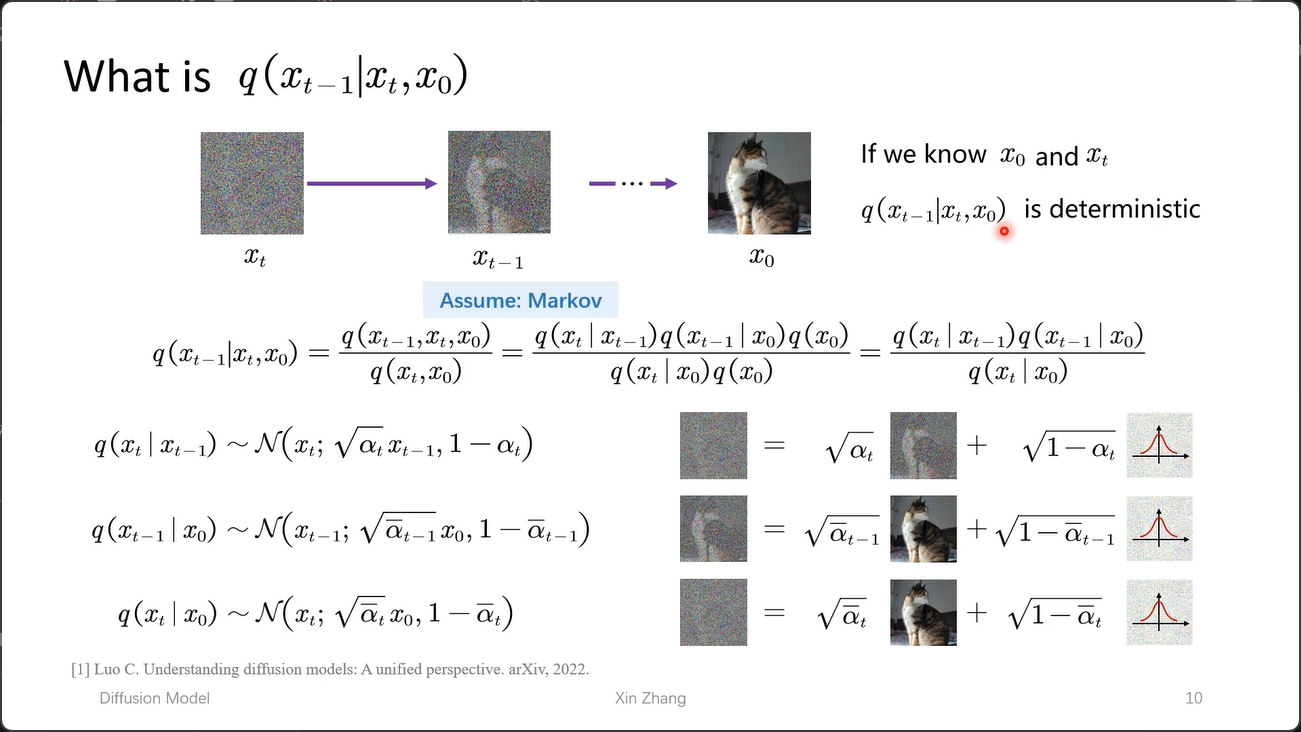
如图,我们用 $x_t = \sqrt{\alpha_t} x_{t-1} + \sqrt{1-\alpha_t} \varepsilon_{t-1}$ 来表示 $x_t$,其中 $\sqrt{\alpha_t}$ 是均值项 mean,$\sqrt{1-\alpha_t}$ 是方差项 std。
\[q(x_t \mid x_{t-1}) = \mathcal{N}\left(x_t; \sqrt{\alpha_t} x_{t-1},\ (1-\alpha_t)\mathbf{I}\right)\]💡 马尔可夫过程:这个前向扩散过程是一个典型的 马尔可夫过程,即每一步的状态 $x_t$ 只依赖于上一步 $x_{t-1}$,与更早的状态无关: \(q(x_t \mid x_{t-1}, x_{t-2}, \dots, x_0) = q(x_t \mid x_{t-1})\) 这一性质使得联合分布可以分解为条件分布的连乘,也使得我们可以直接从 $x_0$ 跳跃式计算任意 $x_t$(详见下文)。
代表在 $x_{t-1}$ 的基础上,加入一个均值为 $\sqrt{\alpha_t} x_{t-1}$、方差为 $(1-\alpha_t)\mathbf{I}$ 的高斯噪声,得到 $x_t$。
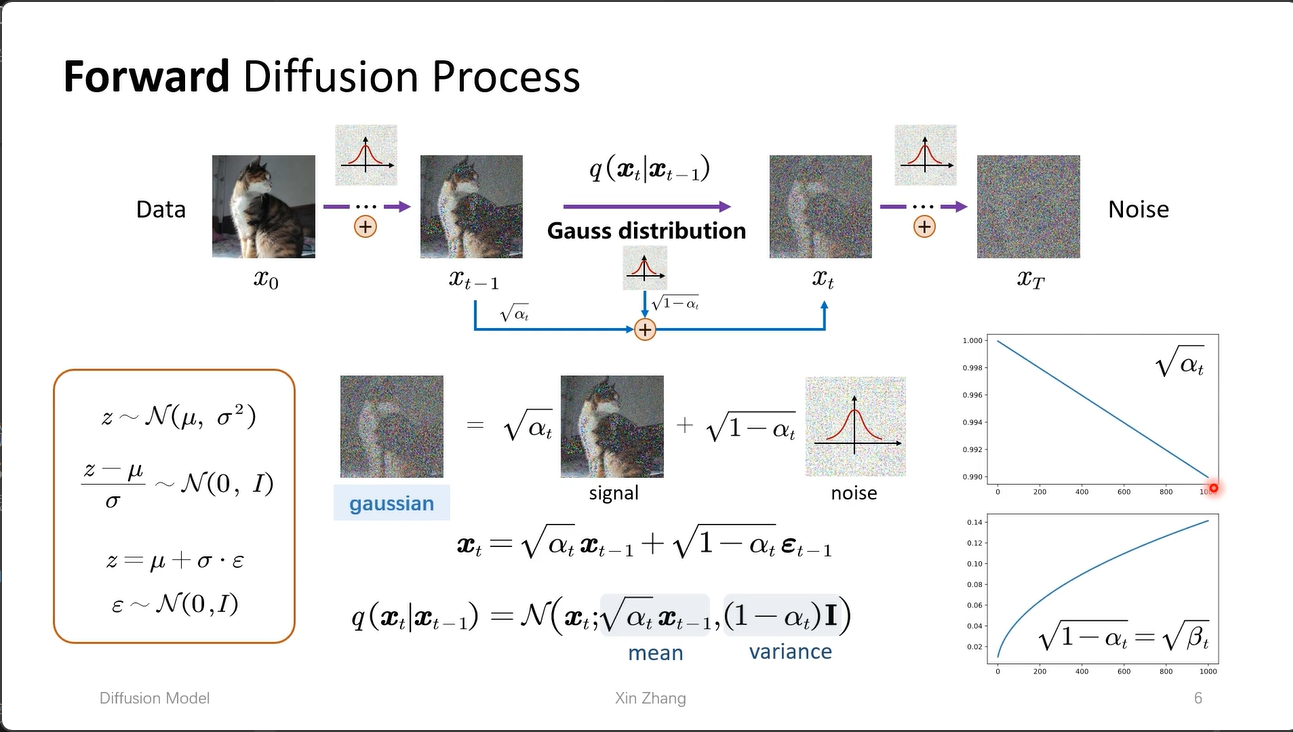
与 $\sqrt{\alpha_t}$ 相乘的是 signal,与 $\sqrt{1-\alpha_t}$ 相乘的是 noise,在原论文中,代表是一个 信噪比 的问题(梦回计网物理层香农定理)。
如图,右侧的是这两个参数随时间变化的趋势,称 Schedule。随着时间的增长,$\sqrt{\alpha_t}$ 会越来越小,代表 signal 的权重会越来越小。如何理解:对于未加噪的图像,我们一开始加的噪声大,对图像的影像也大,但是到后期,我们的图像噪声已经很大,为了让每一次加噪都对图像的影像尽可能一致,我们就会将 $\sqrt{\alpha_t}$ 设置为越来越小,代表 signal 的权重会越来越小。
重要的公式: \(x_t = \sqrt{\alpha_t} x_{t-1} + \sqrt{1-\alpha_t} \varepsilon_{t-1}\)
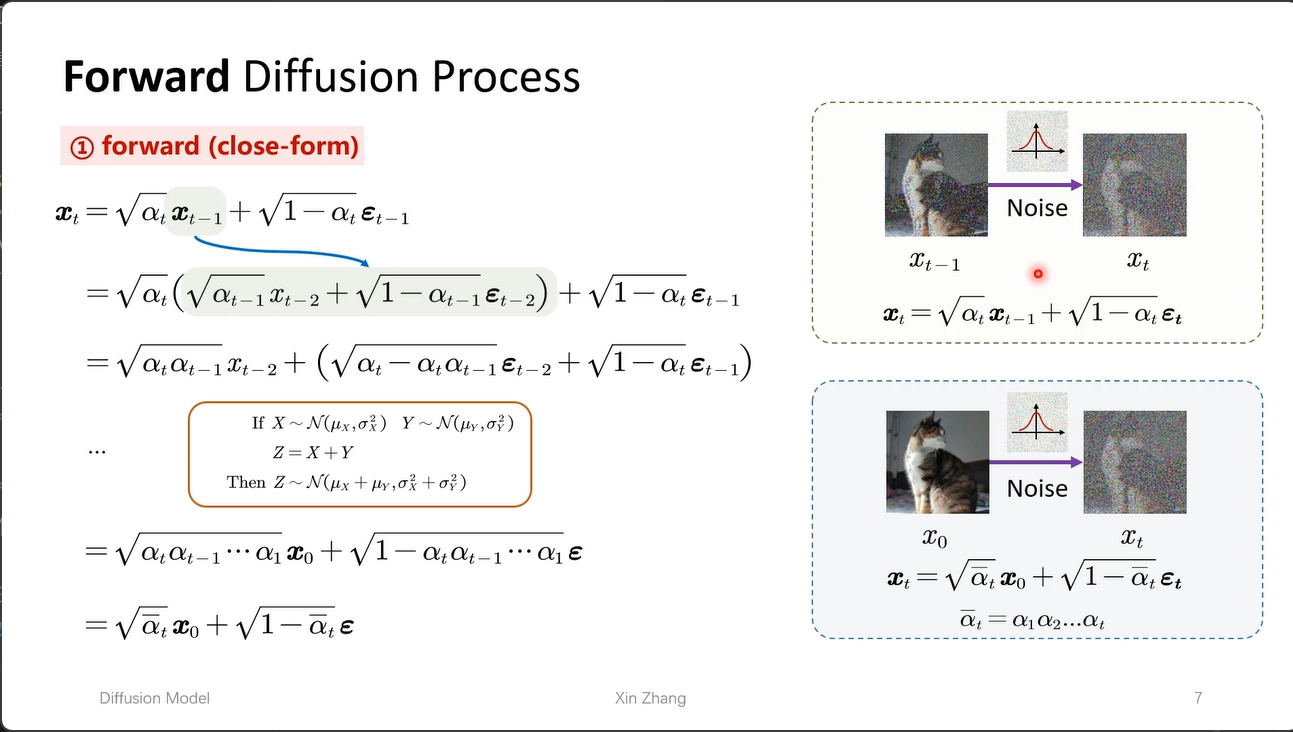
跳跃式加噪
利用马尔可夫性质,我们可以直接从 $x_0$ 计算任意时间步 $x_t$,无需逐 step 迭代。定义 $\bar{\alpha}t = \prod{i=1}^t \alpha_i$,则有:
\[x_t = \sqrt{\bar{\alpha}_t} x_0 + \sqrt{1-\bar{\alpha}_t} \epsilon\]这就是 跳跃式加噪,在训练时只需一步即可得到任意时间步的噪声图像,大幅提升训练效率。
2. 去噪过程
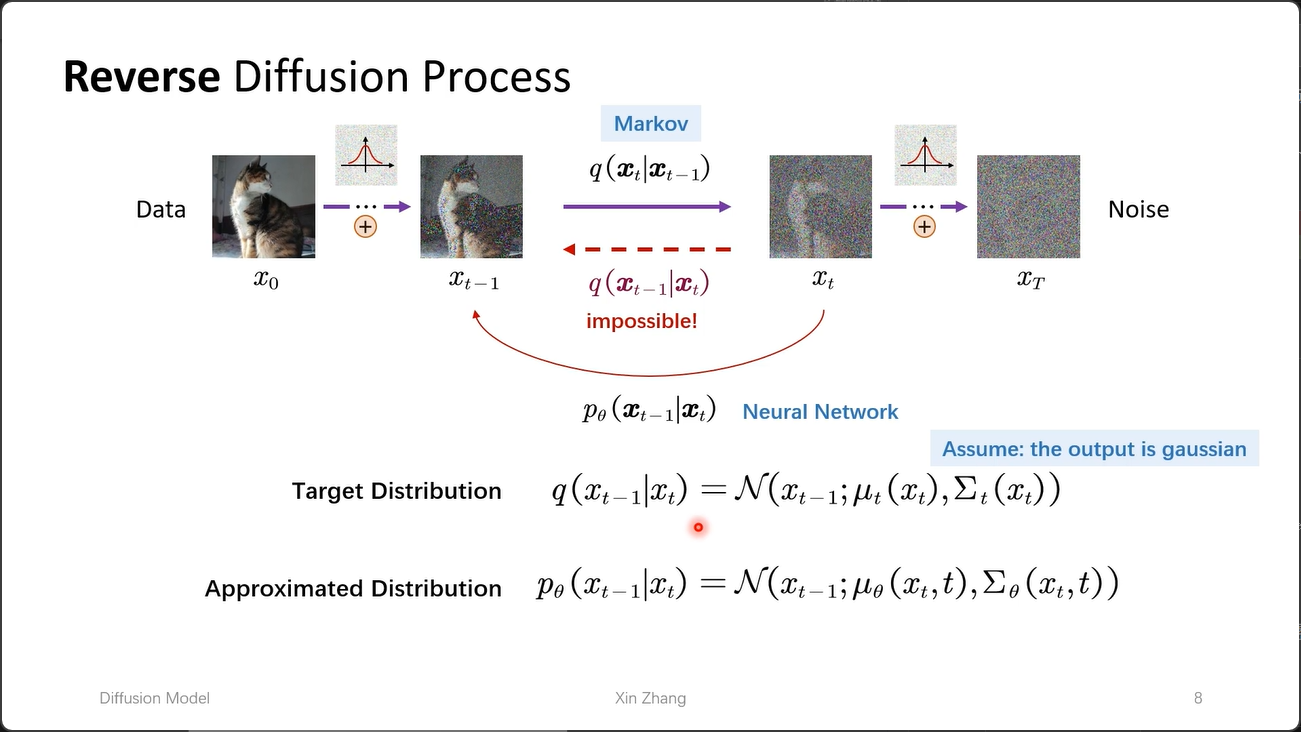
从 $x_T$ 再到 $x_{t-1}$,是几乎不可能的,所以为了反向推出 $x_{t-1}$,我们需要训练一个模型,来预测 $x_t$ 的噪声,然后在 $x_t$ 的基础上减去预测的噪声,得到 $x_{t-1}$,以此类推,直到得到原始图像。
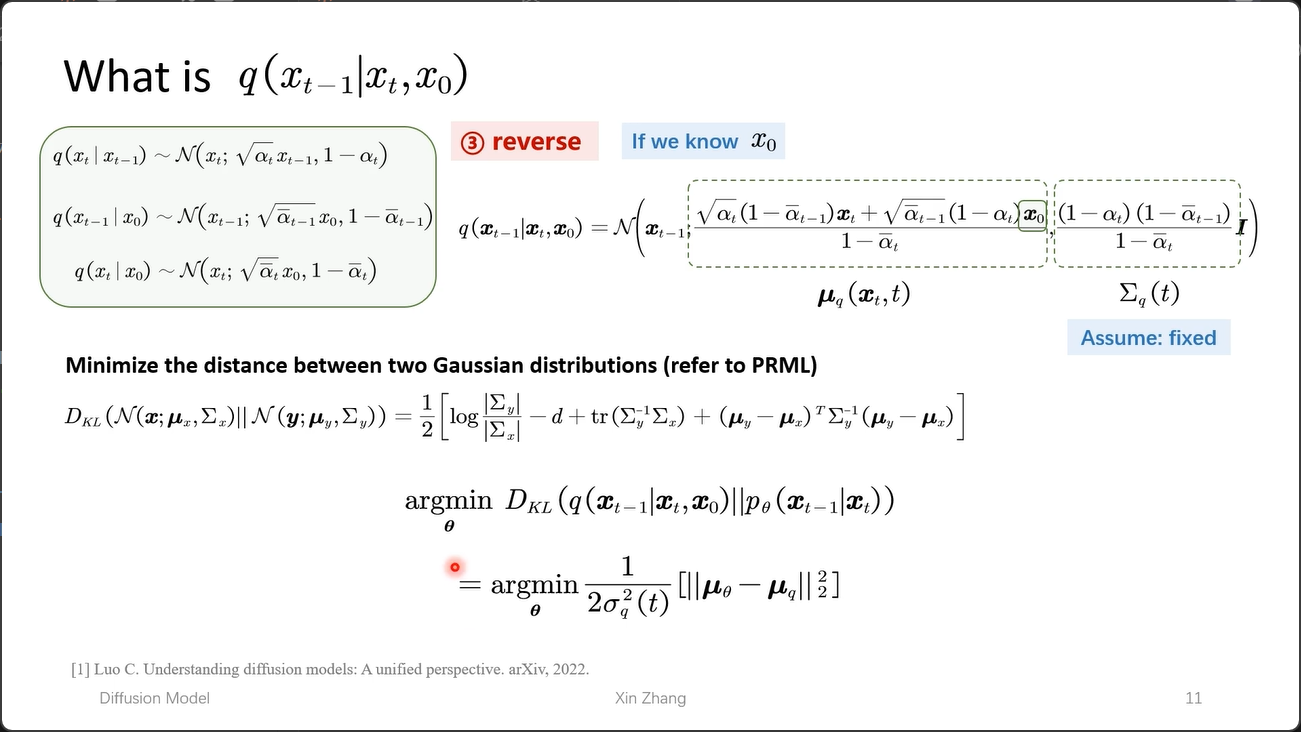
我们认为,我们的目标分布 $q(x_{t-1} \mid x_t) = \mathcal{N}\left(x_{t-1};\ \mu_t(x_t),\ \Sigma_t(x_t)\right)$ 是一个高斯分布,而我们大胆地假设,我们的模型 $p(x_t \mid x_{t-1})$ 也是一个高斯分布,即:
\[p_\theta(x_{t-1} \mid x_t) = \mathcal{N}\left(x_{t-1};\ \mu_\theta(x_t, t),\ \Sigma_\theta(x_t, t)\right)\]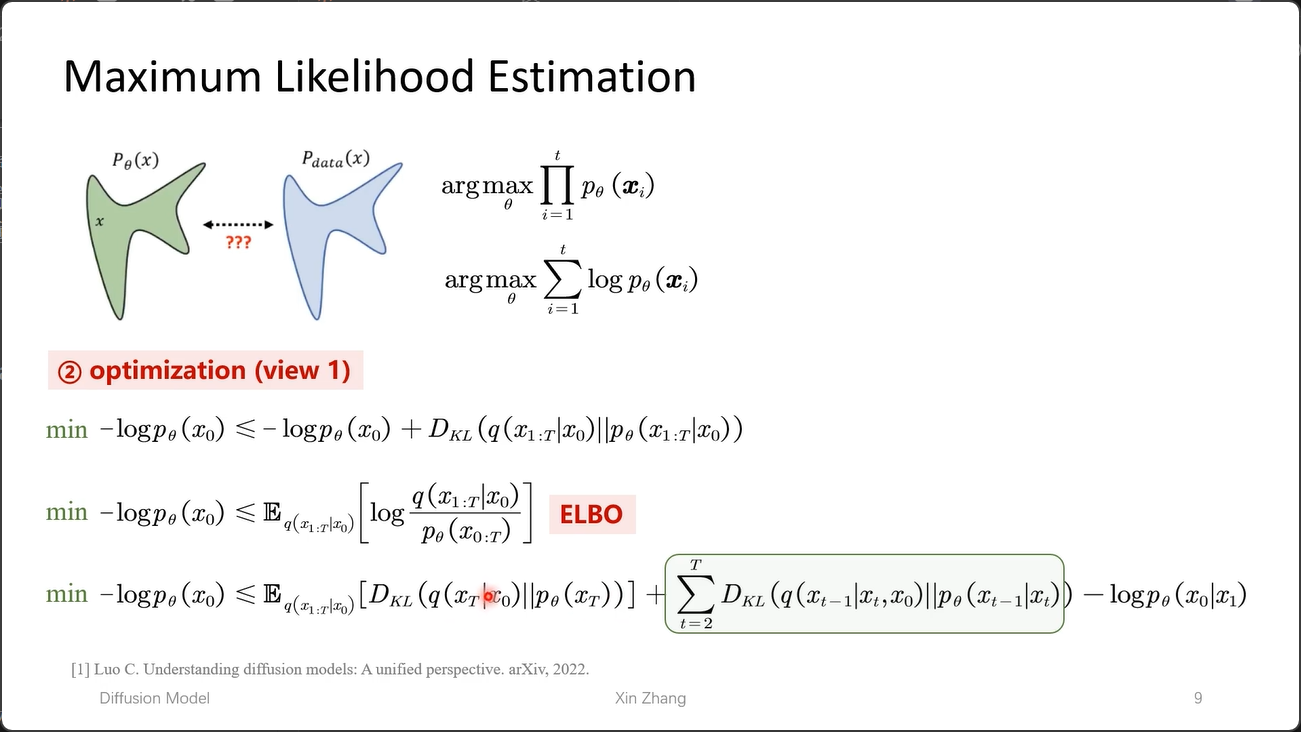
\[\log \mathcal{L}(\theta \mid x_t) = -\frac{1}{2} \left(\frac{1}{\Sigma_\theta(x_t, t)} \left(\frac{x_{t-1} - \mu_\theta(x_t, t)}{\Sigma_\theta(x_t, t)}\right)^2 + \frac{1}{2} \log \Sigma_\theta(x_t, t)\right)\]重要的公式: 最大似然估计 = 最小化负对数似然函数
这里对应 VAE 的损失函数
重要的公式:
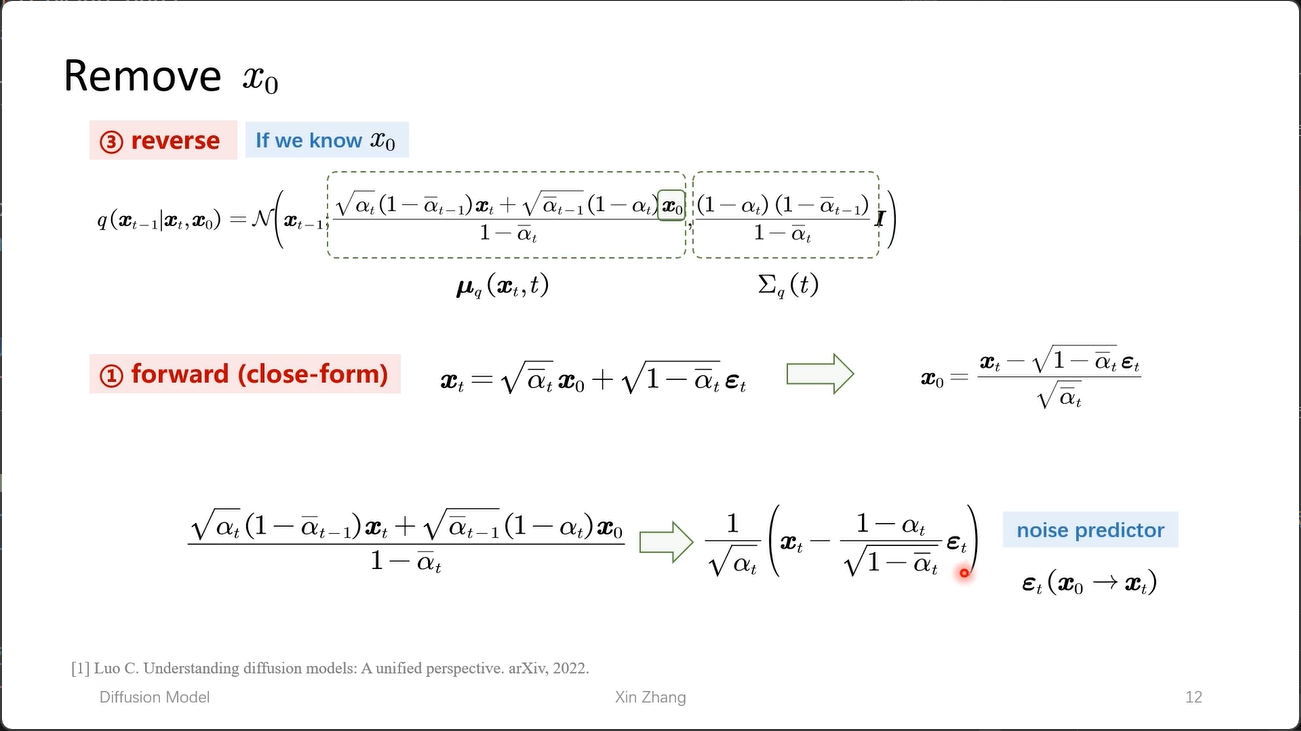
对于整个过程,实际上就只有一个参数 $\epsilon$ 未知,实际上我们训练的模型就是去预测 $\epsilon$(注意这里的噪声是从 $x_0$ 到 $x_T$ 的噪声)。
为啥不直接一步预测呢:这里每一次修正都存在一个修正的过程
3. 训练与采样推导
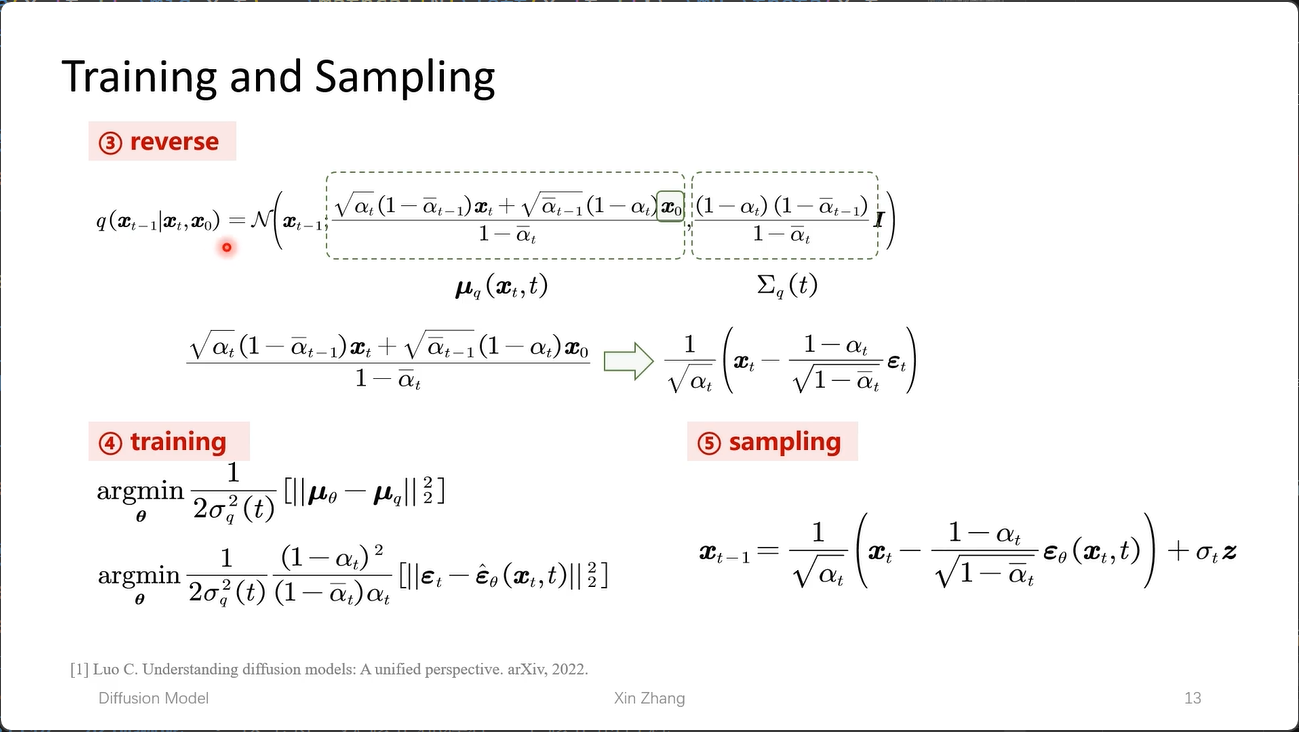
4. 训练步骤
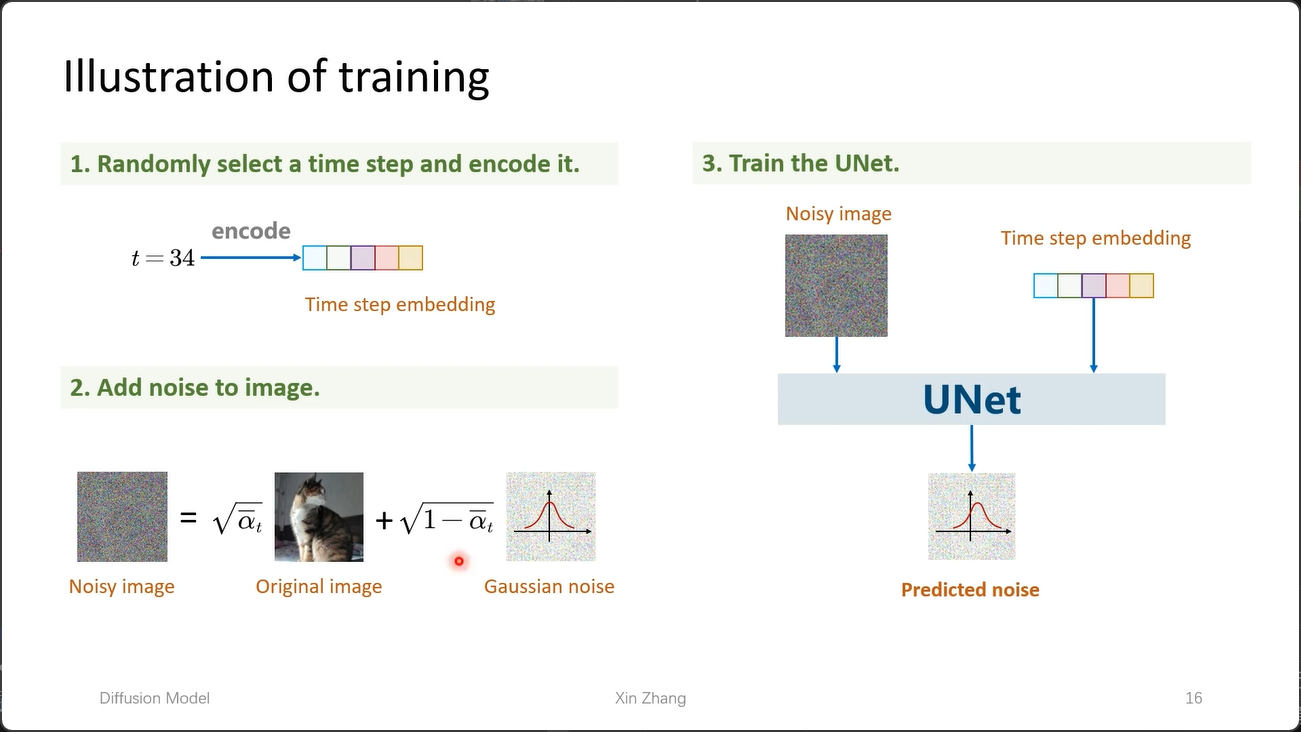
- 随机选一个 time step,然后 encode
- 加噪
- 训练神经网络,一般是 U-Net
- 这里计算的损失就是不同 timestep 对应的两个高斯噪声的 L2 距离
5. 采样
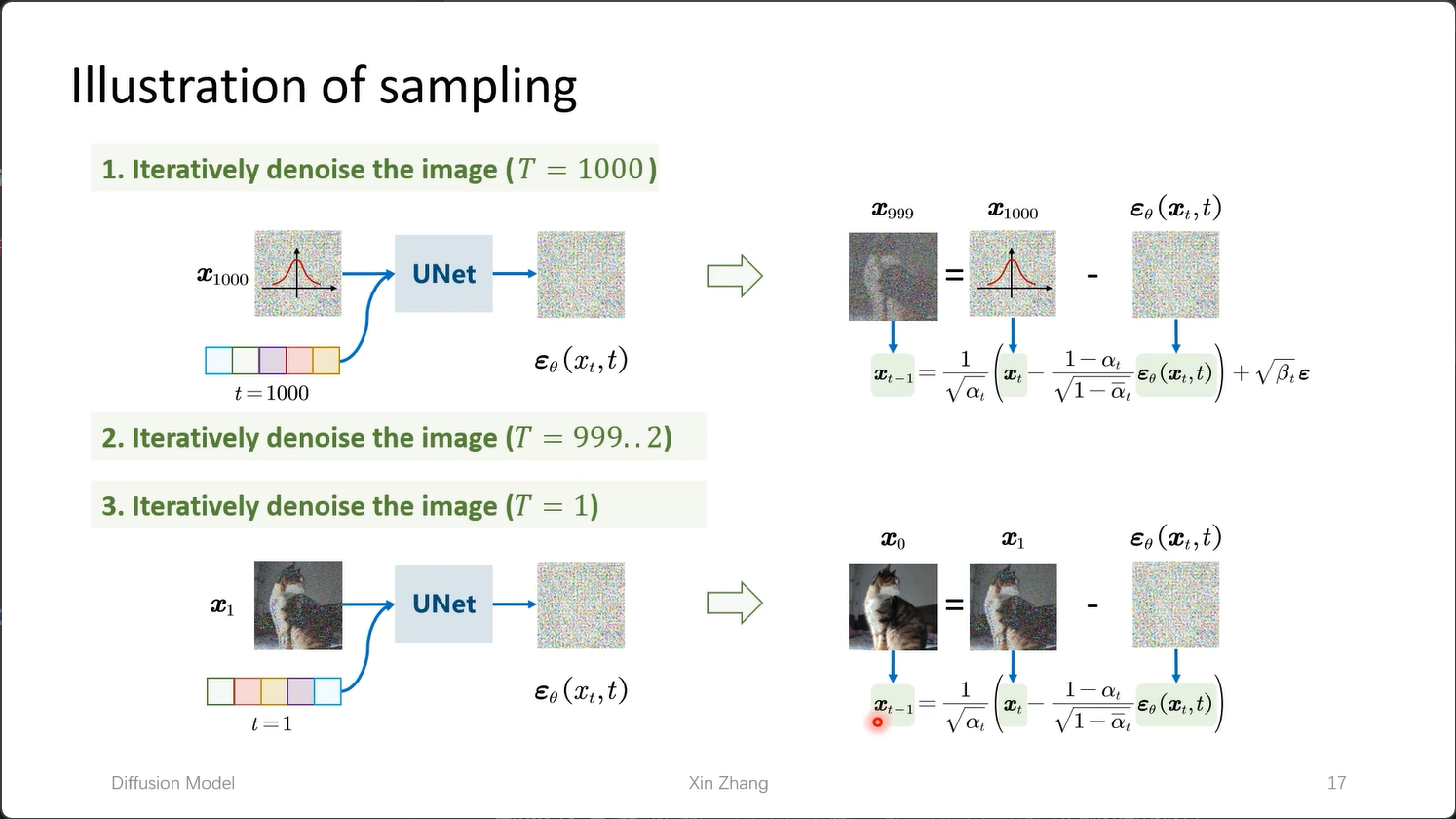
- 从纯噪声开始采样,输入噪声与 time step 后,得到预测的噪声
- 从 $x_t$ 的基础上减去预测的噪声,得到 $x_{t-1}$
- 以此类推,直到得到原始图像
参考与延伸阅读
- DDPM — Ho, J., Jain, A., & Abbeel, P. (2020). Denoising Diffusion Probabilistic Models. NeurIPS 2020. [arXiv:2006.11239]
- 扩散模型起源 — Sohl-Dickstein, J., Weiss, E. A., Maheswaranathan, N., & Ganguli, S. (2015). Deep Unsupervised Learning using Nonequilibrium Thermodynamics. ICML 2015. [arXiv:1503.03585]
- Stable Diffusion — Rombach, R., Blattmann, A., Lorenz, D., Esser, P., & Ommer, B. (2022). High-Resolution Image Synthesis with Latent Diffusion Models. CVPR 2022. [arXiv:2112.10752]
- 重参数化技巧 — [glossary 条目]
- VAE — [glossary 条目]
最好的讲解: https://www.bilibili.com/video/BV1xih7ecEMb/?share_source=copy_web&vd_source=9ddae8a660784d5c8d074cccde4334d6